1 实验简介
本次实验目的为设计一根成本低,结构简单,可以观察并测量的简易激波管。通过压力差产生高马赫的短时气流,并使用管壁上安装的压力传感器记录管内压力变化情况,以此操控高速摄像机,通过纹影技术拍摄测试段的纹影图像。因此,本实验的设计主要分为三个部分:管体设计;纹影成像系统设计;采样系统设计。
2 管体设计
2.1 激波管简介
激波管是一种非常重要的用于空气动力学研究的实验设备,最简单的激波管是一根两端封闭的管子,中间用一张膜片隔开。膜片一侧充入高压气体,称为高压段或者驱动段;另一侧充入实验气体(低压气体),称为实验段或低压段。
当高压段气体的压力超过膜片强度极限时,膜片瞬时破裂,高压段气体进入低压段,形成一系列压缩波。经过一定距离后,压缩波耦合叠加形成一道激波向低压段传播。激波对所经过的气体进行瞬时、非等熵压缩,激波波后的气体温度、压力、密度等参数阶跃上升。当激波传播到低压段端面时发生反射,形成反射激波。对低压段气体进行二次压缩,气体相关参数进一步升高。这时在低压段靠近端面附近布置传感器和光学测量装置,以测量激波速度和反应物在此高温高压条件下的相关参数。激波管在物理化学、高超声速气体动力学及点火延迟等领城有广泛应用。
2.2 激波管原理
最基本的二维激波管结构如下:左侧为高压段,右侧为低压段,中间薄膜隔开。
上图中,(a) 图代表破膜前的激波管情况,其中,下标 “1” 表示低压室的初始状态,用下标 “2” 表示入射激波后到接触面之前的区域,稀疏波和接触面之间的区域用下标 “3 ”表示,高压室的初始状态用下标 “4” 表示,反射激波后的区域用下标 “5” 表示。(b)-(d) 三张 x-t 图分别为激波管内波的运行情况,在时刻 $t_1$ 的压力情况,在时刻 $t_1$ 的温度情况。激波管破膜后的气体状态在理想气体的假设下,可由下列公式计算。此处以激波的运动建立相对坐标系,代表 $u_1$ 激波前气体速度。
反射区 5 区气体可采用同样方式求解。
初始气体的状态参数已知时,利用以上关系式,通过压电传感器测定入射激波的速度,就可以计算出被反射激波后 5 区气体的密度、压力和温度。
2.2 激波管设计
管体整体设计思路为:在管体的左右两侧分别安装一个高压压力罐与低压压力罐,通过两个压力罐带来的压差压破薄膜。当膜片瞬时破裂后,高压气体膨胀加速,压缩低压气体,产生向前传播的激波。经过几次优化,管体内部设计如下:
从左至右分别为:① 高压罐,② 驱动段,③ 收缩管,④ 被驱动段,⑤ 喷管,⑥ 试验段,⑦ 低压罐。
上图为目前几种激波管系统的被驱动段/驱动段体积比,以及其被驱动段的长度/直径比。考虑到实验成本不支持全部定制,因此采用市面上 DN20 以及 DN15 的 304 不锈钢管作为驱动段与被驱动段,主要配件间采用标准法兰连接。初步参数如下:
高压段采用 1MPpa 的高压,膜片放置在 ①-② 之间,②-⑦ 部分连通,并由低压罐抽至 5000Pa 的低压,用这个压力差瞬间破膜,创造压差以引起激波。由于此时气体流速接近一个马赫,由于气体壅塞严重,通过收缩通道进一步对气体加压,最后通过先收缩后扩张的拉瓦尔喷管对气体进行加速。设定驱动段的内径为 20mm,长 400mm,被驱动段的内径为 12mm,长 600mm,试验段内径为 25mm。下面为可行性验证:
2.3 可行性验证
本次实验采用 fluent,对破膜后的情况进行了模拟,从而验证实验可行性。模拟采用 Standard k-epsilon 模型,打开能量方程,使用密度基,瞬态的方式求解。对图中管内模型做可行性验证。
上图为 t = 6ms 时试验段的马赫云图及试验段 1/3 处截面的速度云图。从模拟的结果而言,当前设计可以满足实验条件。
2.4 零件详细信息
高压罐与低压罐均为网上购买的压力罐改造而成。可承受压力满足条件。压力罐上的其他孔位可以安装压力传感器,压力表及接入压力泵与真空泵,从而调节罐内压强。

驱动段,收缩管及被驱动段部分设计合成为一个部件,使用不锈钢 304 制造,左右采用 DN20 法兰方便连接。并在驱动段,被驱动段的头部与末尾分别设置了四个螺纹孔,以安装四个压力传感器。
由于激波运行速度超过音速,在此处采用收缩管而不是扩张管,从而对气流进行进一步加压,在下一段产生更高的压强。
由于收敛管道中的流动连续变化到当地音速即达到临界状态,此处采用先收敛后扩张的拉瓦尔喷管的设计,使施加在气体上的压强瞬间释放,克服流动壅塞,使气流加速到较高的速度,从而满足设计条件。
本次实验中的设计为不锈钢 304 制造,考虑到成本问题,只有中间的异形管道采用金属 3D 打印,并在两头攻丝以连接内丝标准法兰。
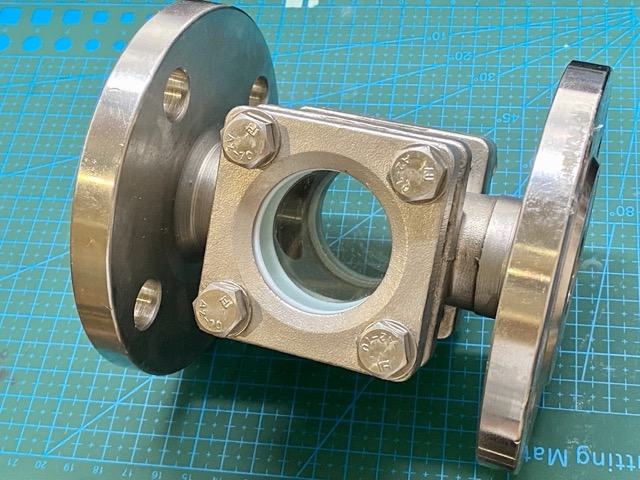
考虑到成本问题,试验段采用现成的 DN25 视窗法兰,耐压足够且方便观察。
由于管内径极小(驱动段20mm),所以很难在不影响流场的情况下设计破膜系统。虽然有人做出了无膜激波管,但由于系统过于复杂,本实验中没有考虑。同样,在文献中发现有人使用土豆枪的快速阀,据文献记载这种阀门造价相对较低(134.99 美元),且拥有薄膜一样的响应时间,但由于价格问题及这种阀门的制造商为一名在美国的个人,因此在本实验中采取压强自动破膜的形式,并选取了多种厚度的膜片进行实验。
膜片的材料使用了文献中查到的麦拉膜。价格低廉且易于切割。分别制造了 0.1,0.125,0.15,0.2mm 厚度的待实验。

3 纹影成像系统
3.1 纹影成像背景
纹影成像技术是利用光线在待测物理场中由浓度梯度或温度梯度所造成的介质折射率梯度的变化引起的偏折传播的现象,从而将组分或温度等物理场的空间分布的直接测量转变为对其物理场梯度(即二阶量)的测量,以大幅提升测量的灵敏度。纹影成像技术可广泛应用于多种应用场景,例如大尺度的风洞试验中观测激波和模型尾流,全尺度机翼尾流探测、大型储气罐泄露检测,以及小尺度的毫米级芯片尺度的散热过程等。通过上述技术手段,在多种场景中实现物理场的可视化对实际工程应用和基础研究都有着重要意义。
传统的纹影成像系统采用Z字形光路设计,由球面反射镜,点光源,凸透镜,刀口和观测设备构成。作为流体力学研究中最常用的测量方法之一,传统纹影成像技术存在以下几点局限性;(1)传统纹影系统一般需要针对视场大小配置对应的透镜系统,以搭建双侧探测的复杂光路,且不具备视场的宽域调节能力,尤其在针对大视场的测量需求中,系统的搭建难度和成本将成为技术应用的瓶颈;(2)由于待测物理场的三维空间分布,测量物理场存在视线积分效应,无法获得具有完全空间解析的物理场信息。
聚焦纹影技术,在约40年前被首次提出,共有两种版本,一种是 Kantrowitz 和 Trimpi 提出的需要两个校准良好的广角透镜的版本,这种版本的视场大小会被镜头的直径所限制,另外一种是 Burton 提出的单透镜版本,此版本只需要一个透镜且视场大小不受镜头限制。
3.2 纹影设备目标
纹影部分旨在搭建一个具有小型、高时空分辨特点的聚焦纹影成像系统,对高速激波风洞的流场进行拍摄。实验装置系统由光源,菲涅尔透镜,成像镜头,格栅和相机构成。通过一定的光路设计,将经过待测区域的源格栅的像投射经过位于对应像平面上的截止格栅。由于在待测区域中产生的光线偏折而无法通过格栅,从而出与组分场或密度场梯度对应的明暗图像,进而可通过图像处理反演如流速、密度分布、流场结构等物理信息。
3.3 设备设计
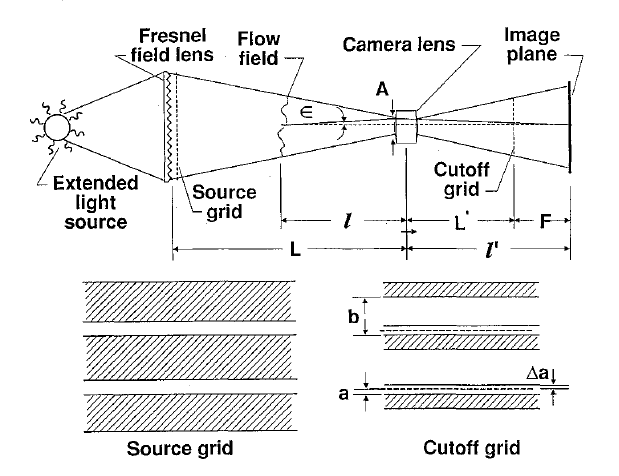
实验装置的光路图如上图所示,其中光源,透镜和格栅的选型参照 Weinstein 提出的选型方法,按照所需的视场大小(25mm*25mm),所需的感光度和分辨率等参数进行,选定的实验装置参数大致如下:
按参数采购的透镜:


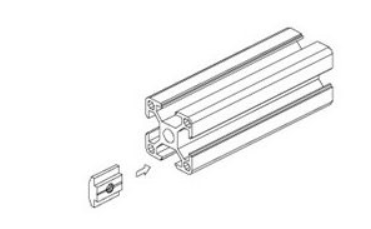
选型完成后,我们开始进行实验装置的设计和采购,初定方案是将所有的光学器件安装在一个滑轨上,固定件通过3D打印制作,通过丝杆或垫片改变高度。优化过程中发现实验室已有现成的铝型材和套筒,所以改变了实验方案,使用 40*40 的铝型材作为滑轨,将套筒通过梯形螺母滑块固定在铝型材上,方便进行水平距离的条件,而套筒本身能进行竖直方向高度的调节。

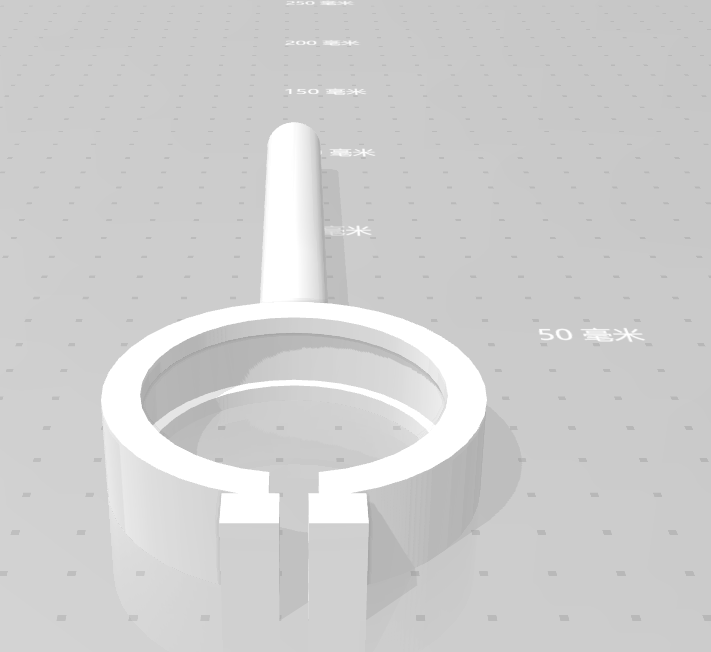
对于透镜夹具的选择,由于我们选购的菲涅尔透镜尺寸较大,凸透镜的尺寸较为特殊(D=52mm),所以在实验室都没有找到合适的夹具,因此我们决定采用 3D 打印方式制作带有连杆的夹具,使其可以直接安装在套筒上。此打印件外包送到了未来工场使用 R4600 树脂光固化打印,精度为 200 微米,表面光洁度良好,满足光学透镜夹具的要求。
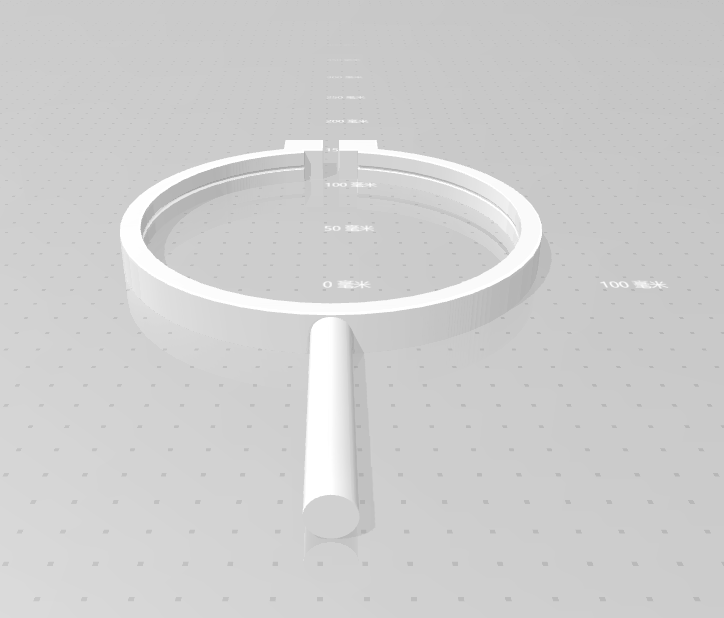
对于格栅,我们选择的是使用喷墨打印菲林,相对于其他制作方式,它的制作成本非常低廉,而且效果较好。根据选型中确定的条纹宽度和间隙,使用软件在A4纸上画出格栅图案并送出进行打印,使用亚克力的相框将其安装在光学台上。
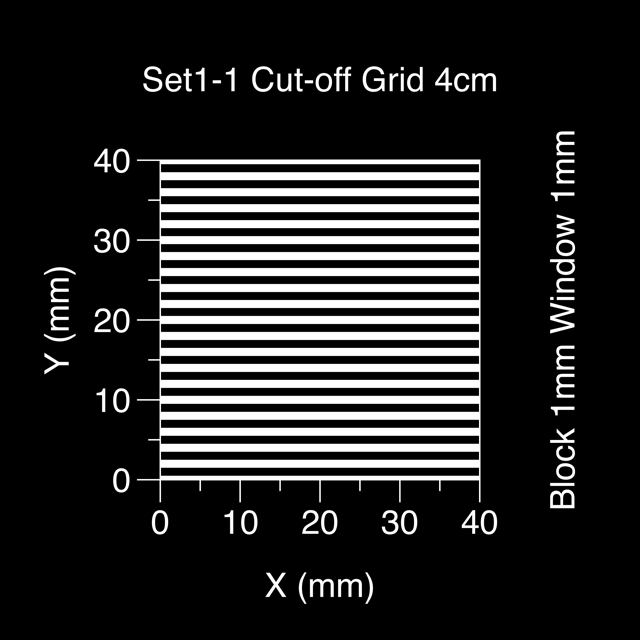
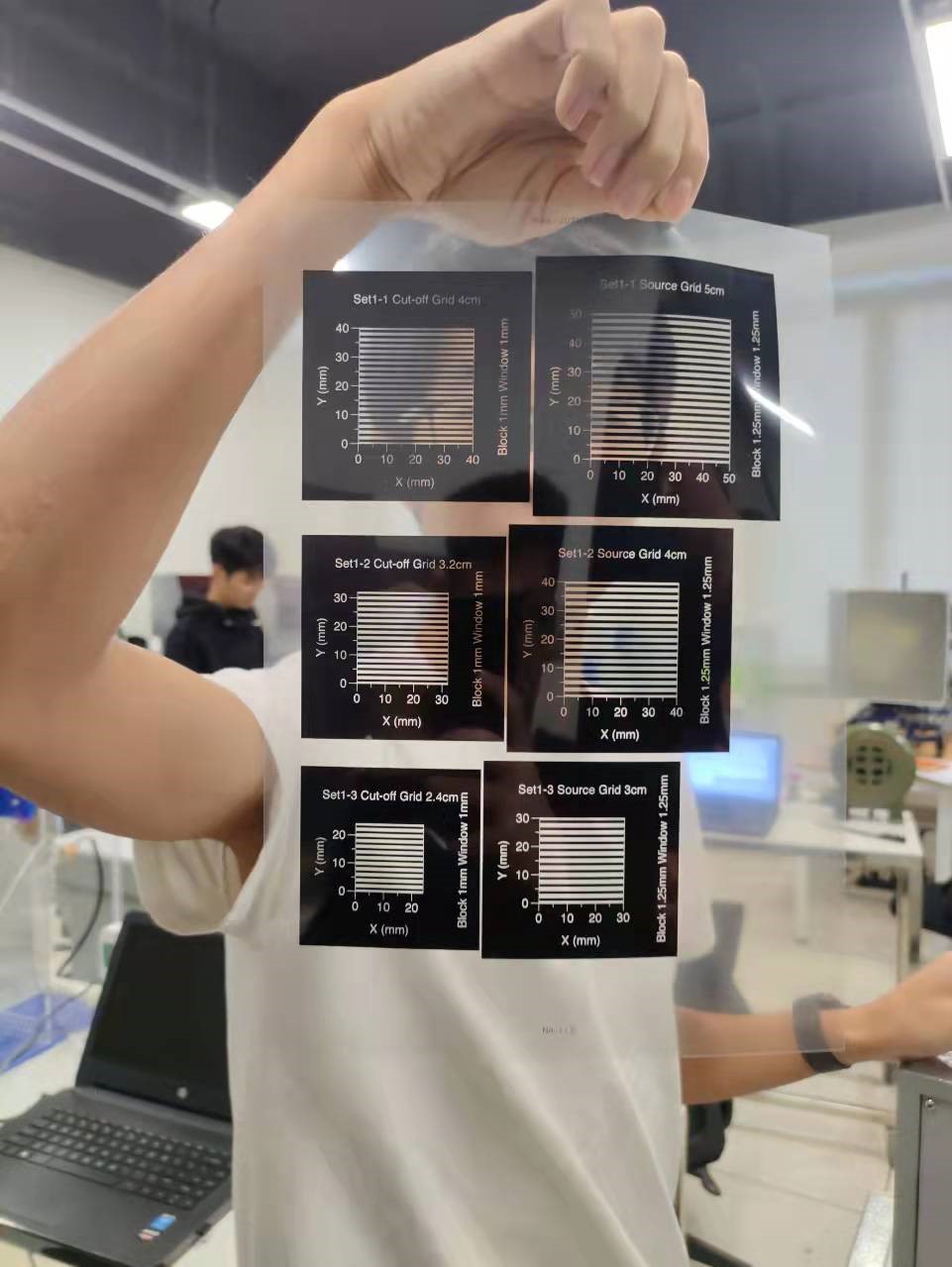
但由于黑色菲林的遮光性不是非常的好,在进行初次实验后我们决定将源格栅保留为喷墨菲林,将截止格栅换成激光切割的不锈钢薄片。
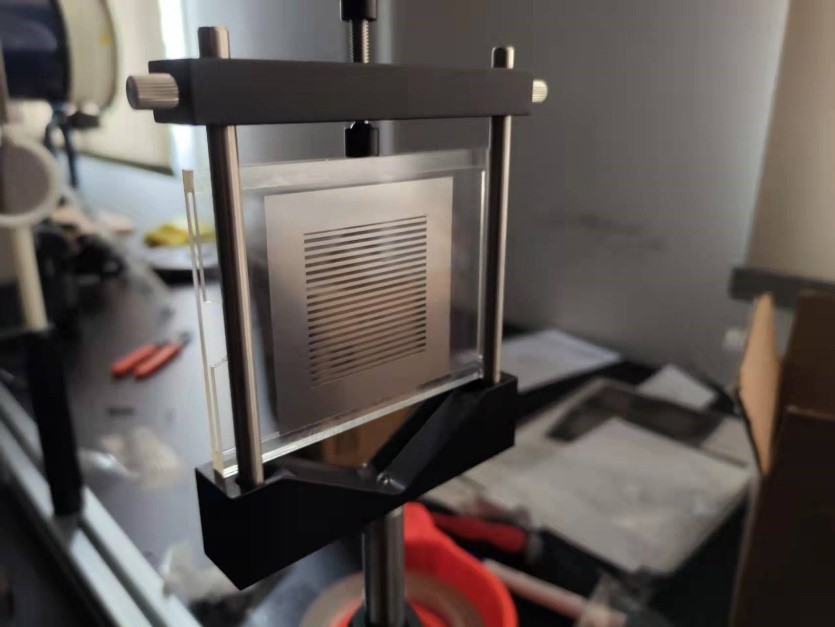
按照设计参数将实验装置搭建好,通过打光完成微调以及各器件的对中之后,即可开展实验。
3.4 设备测试
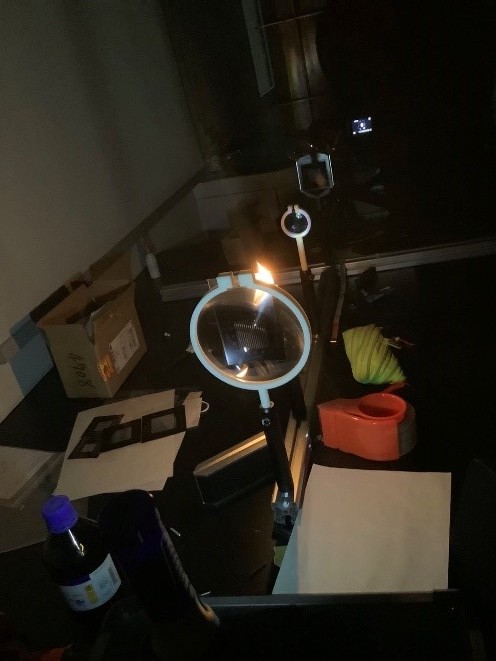
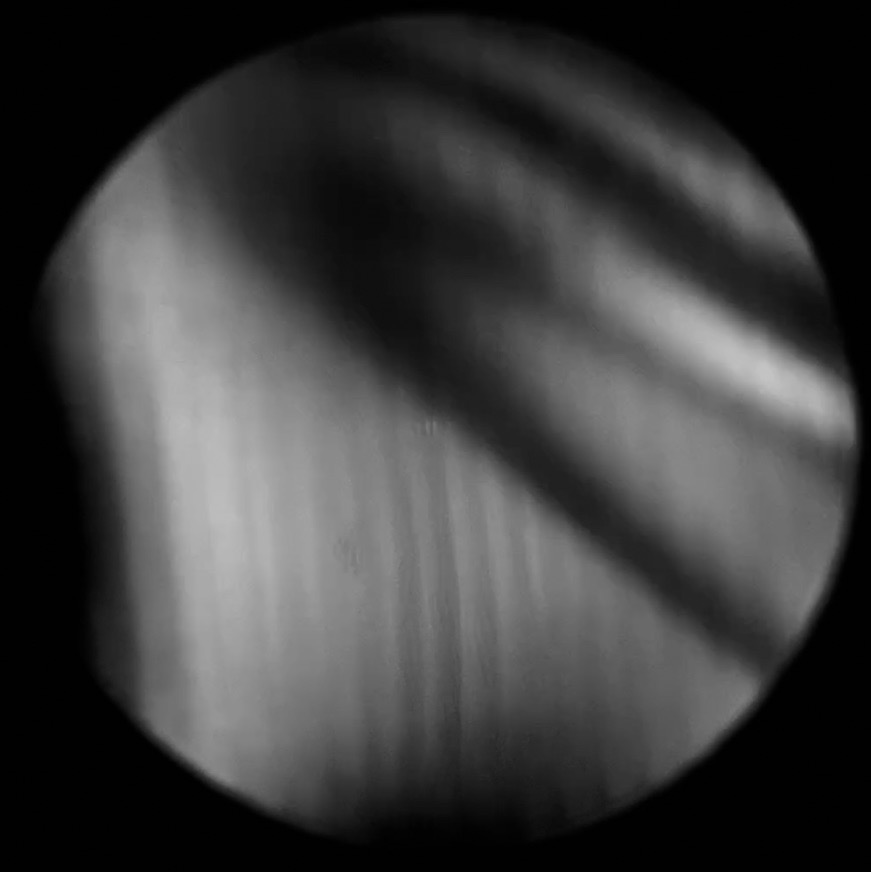
由于风洞的搭建需要时间,而纹影系统的搭建已经完成,我们先进行了对蜡烛(扩散火焰)流场的观测。使用我们搭建的纹影系统可以清晰拍摄到流场的流动结构并录制了视频。
3.5 总结与改进方案
本实验光路的选型和搭建都较为成功,取得了一定的实验成果,通过这次设计实验,小组成员对纹影系统的原理都已比较熟悉,也积累了一定的实验经验。
传统的聚焦纹影成像系统(本实验所采用的光路)为一字型光路设计,由两面菲涅尔透镜,点光源,凸透镜,源格栅,刀口栅和观测设备构成。本设备存在以下缺点:(1)光路调制和搭建较为复杂,在源格栅和截止格栅的条纹较细时,难以实现完美竖直方向的对正;(2)纹影成像的时间分辨由相机快门控制,而有限宽度的相机快门(毫秒量级)将导致在测量高速运动过程的模糊,而过低的相机快门宽度也将导致信号亮度不足,无法显出清晰的图像。
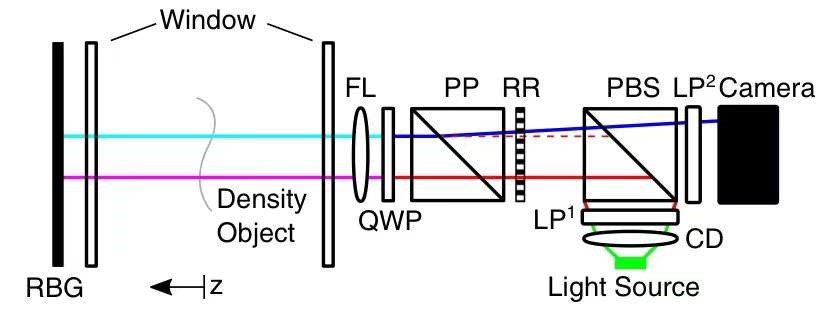
针对以上问题,改进方案拟采用新型聚焦纹影成像方法,利用光的偏振特性结合双折射晶体、波片等偏振器件对成像路径中的光的偏振特性调制,实现单侧纹影成像,可以极大地提升测量系统的便携性,并通过控制成像系统景深,获得较好的空间分辨。另一方面,改进系统可以与周波老师实验室前期开发的高重频高功率脉冲 LED 光源相结合,以实现测量过程的高时序瞬态分辨。该光源具有 1-1MHz 宽重频范围内的调节能力,用于捕捉快速动态过程。同时,与传统纹影系统通过相机控制快门相比,该LED光源可输出瞬时光功率高于 100W、线宽约 10nm、脉宽 30ns 的准单色高亮度脉冲,我们可以将光源作为实验装置的快门,通过光源来控制曝光时间,获得 ns 量级的时间解析以及 MHz 级的时序解析,真正实现高时空分辨,使纹影系统更适合用作超音速风洞的流场显示。
4 采样控制系统
自行制作采样设备是由于能够满足多通道、高采样率、可编程触发功能的产品过于昂贵,远远超出本次项目预算范围,并且在调研之后发现自己制作应该可以满足以上要求。
本次项目主要需求是:记录激波经过传感器的气压变化;通过多通道采集,计算波面移动速度;通过测量激波管内压强估计试验段实验时间;触发高速摄像机拍摄。
4.1 元件
4.1.1 MCU
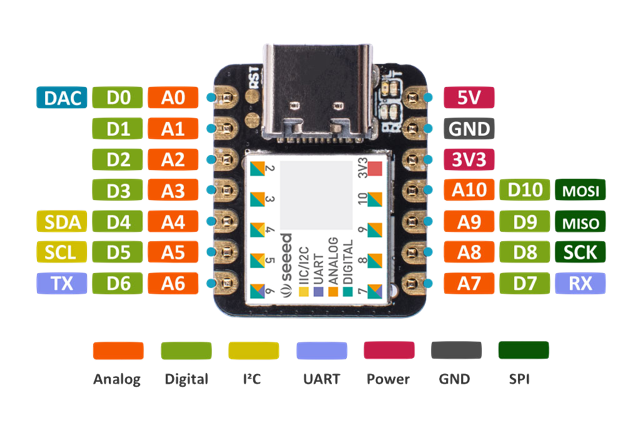
第一版本中使用了 Arduino 环境进行开发,因为 Arduino 开发环境简单易于上手,而且教程案例很多。硬件是 Seeeduino_Xiao,优点是体积小、价格低。其拥有 SPI、I2C、UART 接口各一个,CPU 核心频率为 48Mhz。设计使用 SPI 高速链路获取 ADC 芯片采样数据,使用 I2C 驱动屏幕显示运行状态,UART 接口向储存模块写入数据,或者通过 USB 向电脑传输数据。Seeeduino 此时还剩余四个 GPIO 接口分配给相机触发、ADC 状况检查、ADC 片选以及用户控制。
4.1.2 ADC
模数转换器选用的是德州仪器 ADS8638 芯片。具有可选输入范围:$\pm$10V、$\pm$5V、$\pm$2.5V、0V 至 10V,或 0V 至 5V,多种范围可以匹配各种传感器。八通道总采样速率达 1 MSPS,采样深度为 12 bits,超出压力传感器的响应速度。在测量波面压力变化时可以设置为单通道采样,获得最高采样频率;测量压力波到达不同位置的时间时,可以设置为多通道采样。ADS8638 使用 SPI 进行控制以及传输数据,最高频率为 20Mhz。

4.1.3 屏幕
使用 SSD1315 驱动的 128x64 OLED 0.96 寸显示屏,使用 I2C 通讯。
4.1.4 存储
第一版本想使用成品 UART 串口 SD 卡存储模块,波特率 961200。随后发现模块无法使用并且波特率不足以实时传输采样数据,最小波特率需要 1M * 12bits = 12M。
4.1.5 接口
使用四节 3.5mm 音频接口作为信号输入以及输出接口。因为 3.5mm 接口应用广泛价格低,而且可以实现检测接口是否插入,拔出后触电接地。四节接口可以提供:信号输入、信号地、传感器供电、供电地。
4.1.6 传感器
传感器考虑到测量高压、响应迅速,选择了压电陶瓷传感器,使用电桥放大信号。
4.2 电路设计
以上元件需要各种电压的供电,整个系统的电源 VIN 为 Arduino 的 USB 5V 供电,通过不同转换电路提供给其他元件。ADC 供电需要四种电源: 3.3V 的模拟电源以及数字电源、+10V 和 - 10V 的高压电源、2.5V 基准电源。
3.3V 数字电源由 Arduino 内置转换器提供,3.3V 模拟电源 AVDD 由一颗 LDO(线性稳压器)芯片提供:

使用一个 Boost DC-DC 电路从 5V 转换为 +10V,再使用一个电荷泵芯片转换为 -10V:


基准电源需要高精度,所以使用德州仪器的 REF5025 基准电压芯片:

屏幕还需要特殊 3.8V 电压供电,也使用 LDO 芯片:

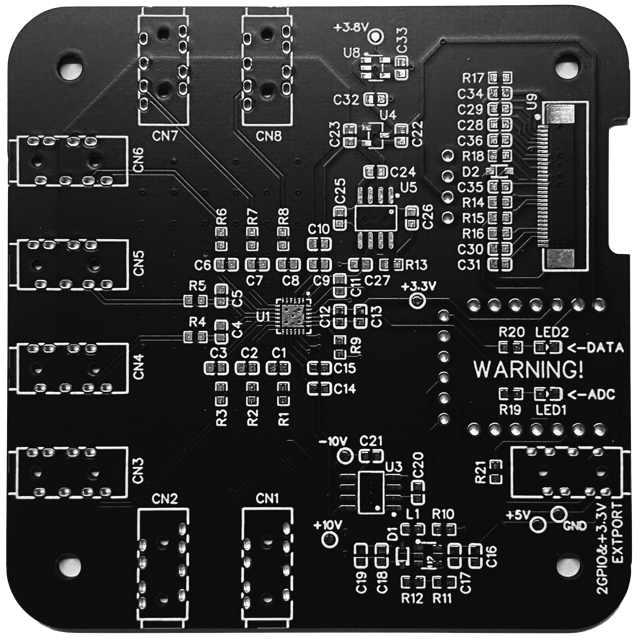
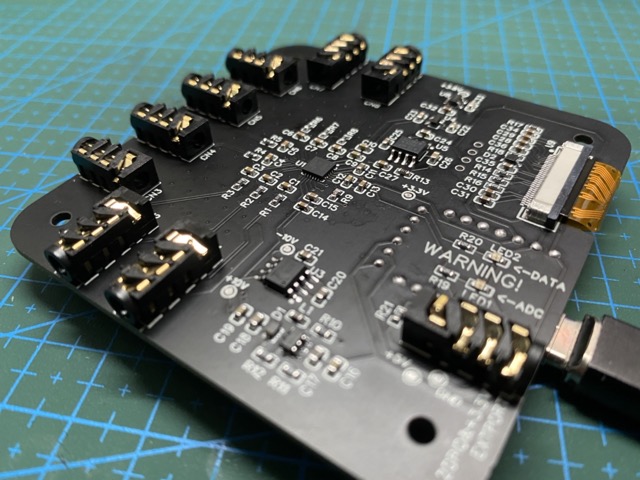
4.3 PCB 设计
PCB 使用 1.6mm 双层板,因为没有高速通讯电路,要求不高。在 ADC 芯片下方单点接地,在输入信号线路周围和背面大面积铺铜减少干扰。正面走模拟信号以及供电线路,背面走数字通讯线路。SPI 线路根据要求需要做阻抗匹配,I2C 需要做上拉电阻,UART 线路直连,信号输入在靠近 ADC 芯片处添加低通滤波。供电电路尽可能使用铺铜,供电输入输出添加滤波电容。屏幕根据要求配置周边元件。最终 PCB 长宽为 7.5cm。

4.4 控制代码
4.4.1 ADC 驱动
ADC 使用 SPI 进行控制以及数据传输,SPI 是一种全双工总线,可以同时传输指令以及数据。通常使用四根线路:
MISO– Master Input Slave Output,主设备数据输入,从设备数据输出;
MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入;
SCLK – Serial Clock,时钟信号,由主设备产生;
CS – Chip Select,从设备使能信号,由主设备控制。
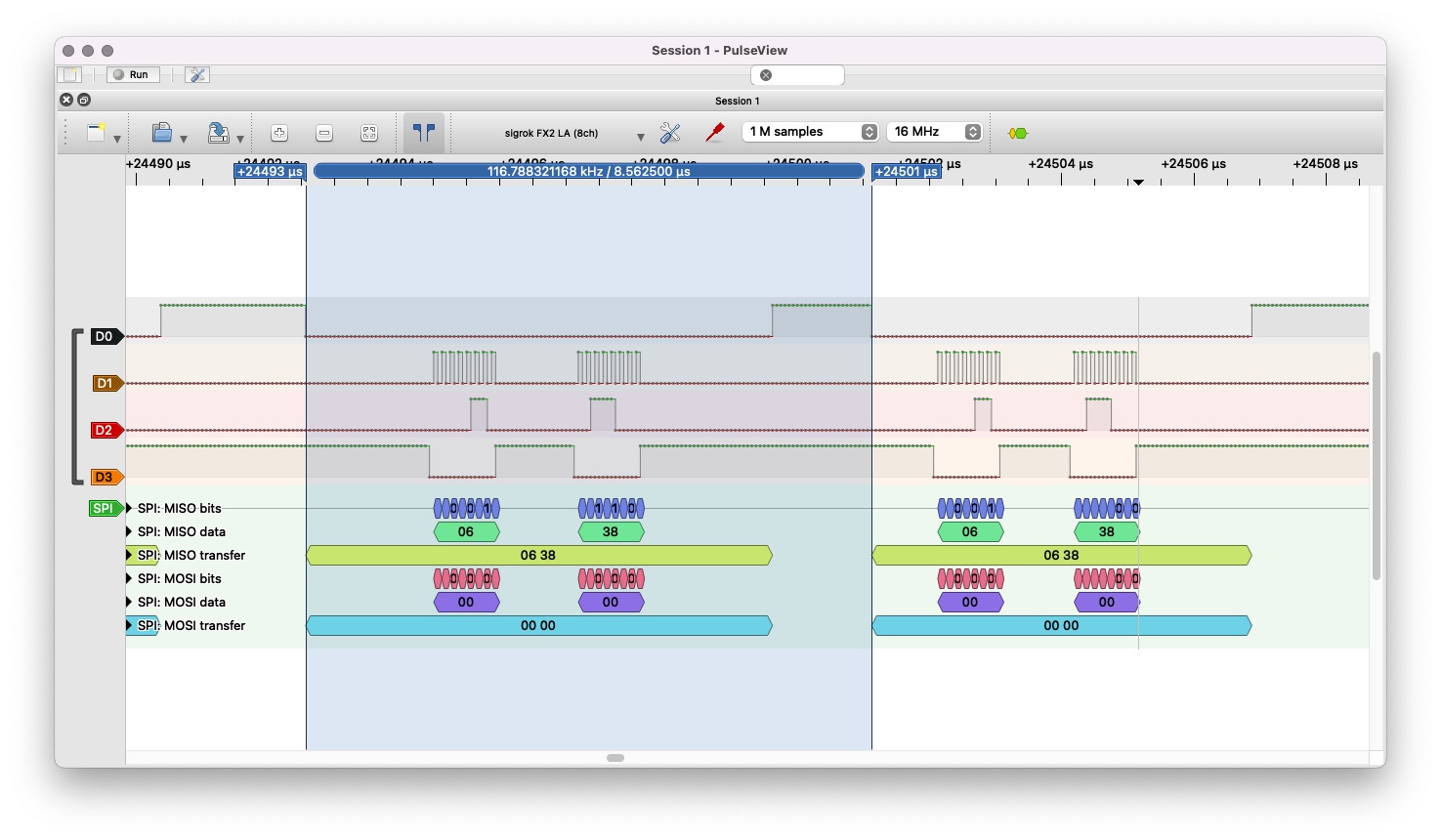
SPI 传输具有多种模式,此芯片使用的是 MSB_First(最高有效位在前),SCLK 低电平为 idle,在 SCLK 上升沿读取,在 SCLK 下降沿输出。
由于 SPI 速率与 CPU 时钟频率相关,本次设置为 CPU 频率的四分之一,16Mhz,此时 ADC 最大采样速率为 0.8MSPS。
根据官方文档控制启动顺序:AL_PD 拉高,第一个 CS 下降沿后经过至少 16 个时钟脉冲后开始传输。Arduino 调用 SPI.h 库进行初始化:
digitalWrite(AL_PD, HIGH);
delay(1);
digitalWrite(CS, HIGH);
delay(1);
digitalWrite(CS, LOW);
SPI.beginTransaction(SPISettings(16000000, MSBFIRST, SPI_MODE0));
根据 ADS8638 官方文档,其通讯顺序遵循以下模式:

ADS8638 有手动和自动两种模式,自动模式可以在选定通道内循环采样,手动模式可以人工选择通道。采样将会发生在指令后一个周期,而传输将会发生在采样后一个周期,也就是信号输出将会晚于指令输入两个周期。
一个周期传输 16bits 数据,数据结构如下:


进行测试,循环代码如下:
digitalWrite(CS, LOW);
short ADC_Data = SPI.transfer16(0);
double Voltage = ((double)ADC_Data - 2048) * 10 / 2048;
digitalWrite(CS, HIGH);
理想情况下 ADC 此时会以最大采样速率工作,但由于 Arduino 代码运行效率远低于预期,CPU 使用了超过预计的时间运行代码,并且此时还未加入存储指令。根据逻辑分析仪可以看到此时 ADC 最大采样频率只能达到 117kSPS,远低于预期的 0.8MSPS。
4.4.2 屏幕驱动
屏幕集成了驱动芯片 SSD1315,可以通过 I2C 进行通讯。使用 Arduino 的 Wire.h 库,根据文档进行初始化:
Wire.begin(); // join i2c bus
delay(100);
OLED_WR_Byte(0xAE,OLED_CMD);// turn off oled panel
... // omit some command
OLED_WR_Byte(0xA6,OLED_CMD);
OLED_Clear();
OLED_WR_Byte(0xAF,OLED_CMD); // display ON
delay(1000);
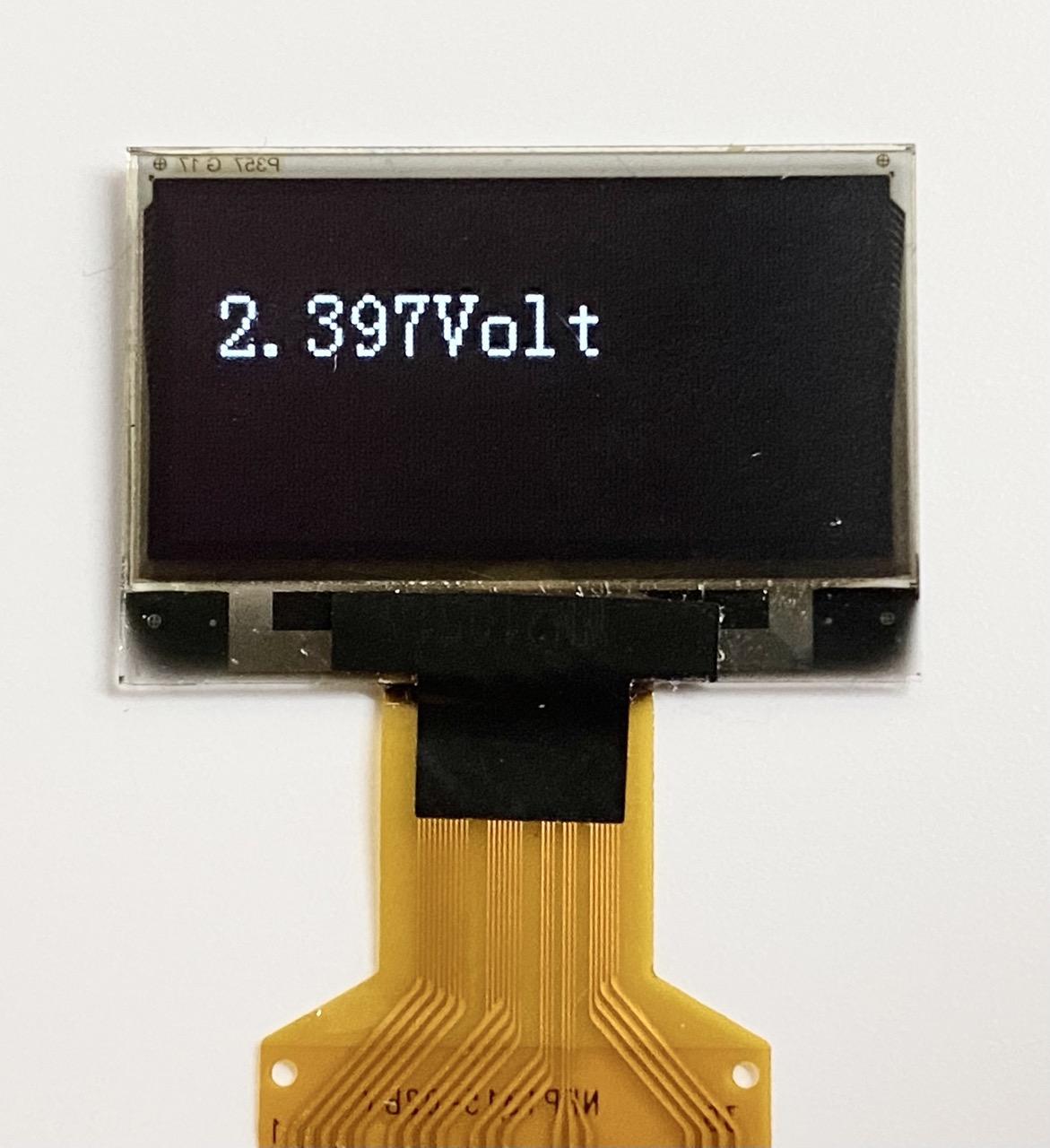
其中 OLED_WR_Byte() 用来合并指令和数据。之后 include 点阵字体库,使用 OLED_ShowChar 显示字符(代码省略)。循环代码如下:
digitalWrite(CS, LOW);
short ADC_Data = SPI.transfer16(0);
digitalWrite(CS, HIGH);
float Voltage = ((double)ADC_Data - 2048) * 10 / 2048;
char OLED_Num[] = " ";
dtostrf(Voltage, 1, 3, OLED_Num);
OLED_ShowString(8,2,OLED_Num,16);
OLED_ShowString(48,2,"Volt",16);
delay(100);
效果如图:
4.4.3 数据传输
SD 卡存储模块不能使用,但是可以通过 USB 接口传输数据。初始化设置波特率:
Serial.begin(9600);
调用 print 函数:
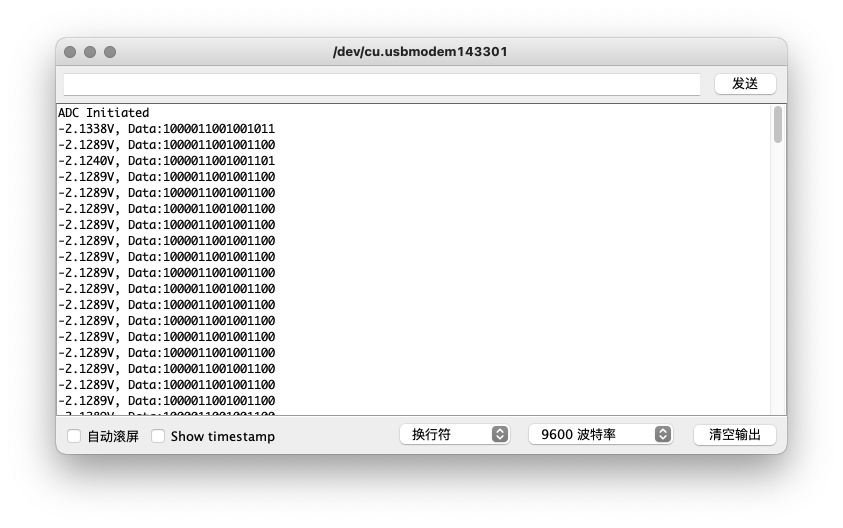
Serial.print(Voltage, 4);
Serial.print("V, Data:");
Serial.println(ADC_Data + 0x8000, BIN);
效果如图:
4.5 采样控制系统总结
采样系统可以实现预期功能,但是性能不足,采样速率最高只能达到 60kSPS 左右。主要原因是 Arduino 代码运行效率低,CPU 频率不够高。第一版本说明了自制采样设备的可行性。
最终第一版本的成品效果如下:

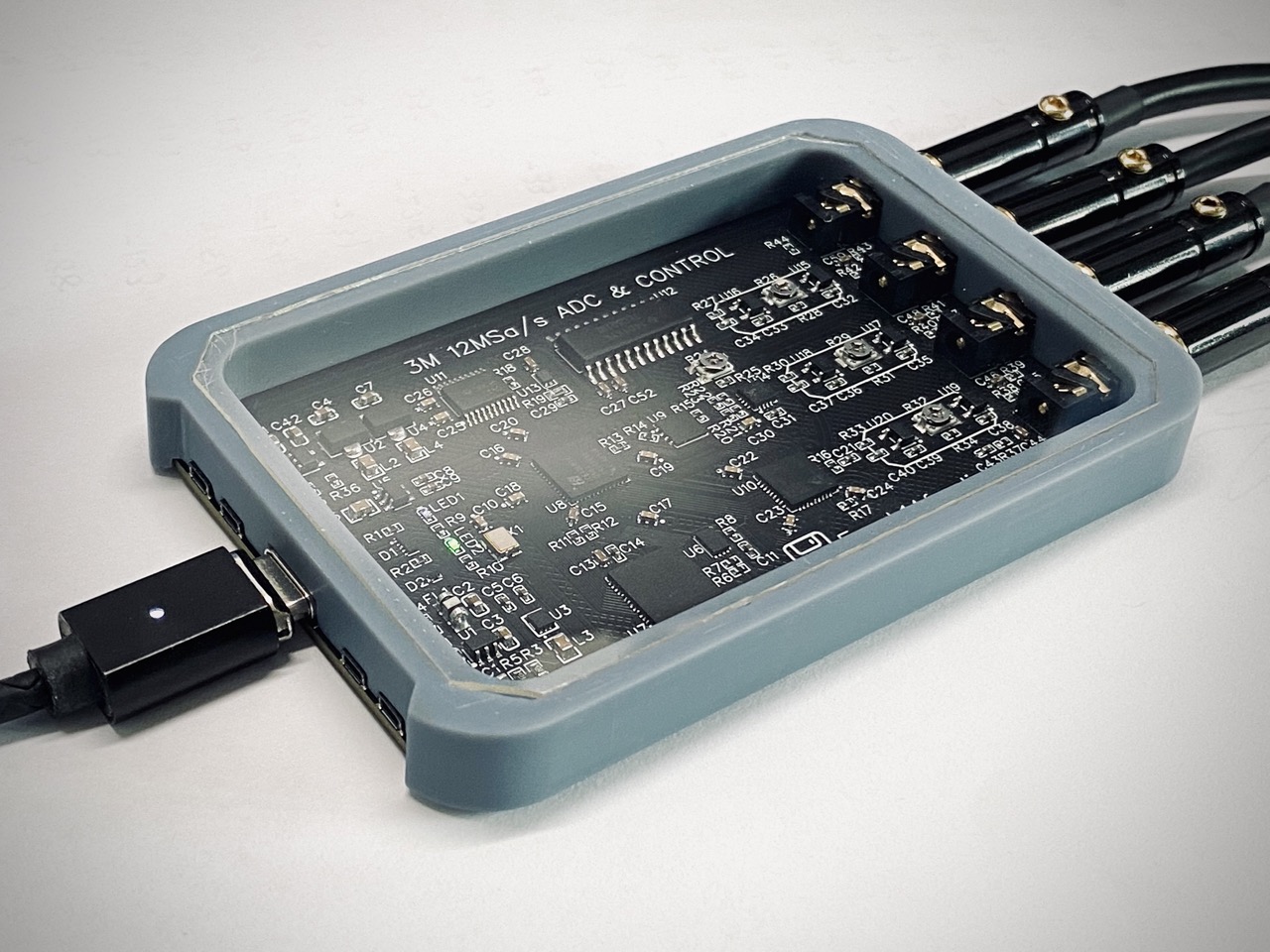
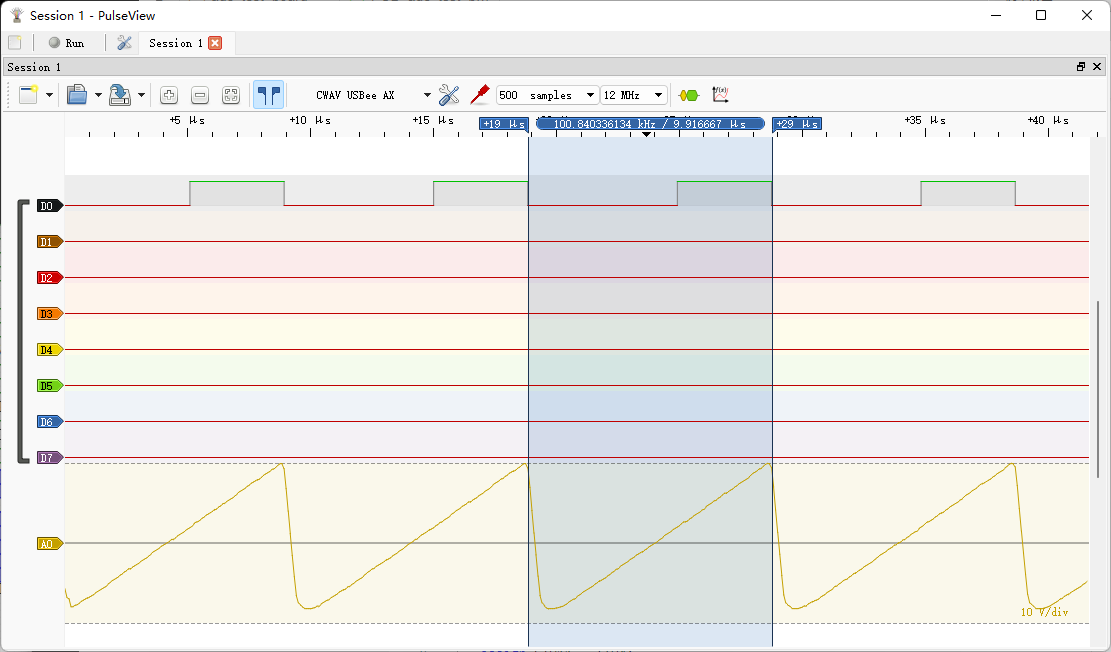
4.6 采样控制系统第二版本
以开源项目 sigrok 为基础,USB 通讯部份使用 CY7C68013A 实现了高速 USB2.0,ADC 为 TLC5510,使用一片 iCE40LP1K FPGA 实现快速控制。最终实现了 12 MSPS 一通道 8bit 模拟信号加八通道数字信号长时采样以及控制。成品如下:
5 References
Bergmann B Edward, "Design of an Inexpensive PVC Shock Tube for Educational Use" (2021). Rowan Digital Works. 2939. https://rdw.rowan.edu/etd/2939
汪球,赵伟,滕宏辉,姜宗林.高焓激波风洞喷管流场非平衡特性研究[J].空气动力学学报,2015,v.33;No.150(01):66-71.
谌君谋,陈星,毕志献,马汉东.高焓激波风洞试验技术综述[J].空气动力学学报,2018,v.36;No.171(04):543-554.
俞鸿儒.Oxyhydrogen Combustion and Detonation Driven Shock Tube[J].Acta Mechanica Sinica,1999,15(02):97-107.
Weinstein L M. Review and update of lens and grid schlieren and motion camera schlieren[J]. The European Physical Journal Special Topics, 2010, 182(1): 65-95.
Weinstein L M. Large-field high-brightness focusing schlieren system[J]. AIAA journal, 1993, 31(7): 1250-1255.
Bathel B F, Weisberger J M. Compact, self-aligned focusing schlieren system[J]. Optics Letters, 2021, 46(14): 3328-3331.